Design considerations when implementing haptic technology
By Sonja Taylor Brown, senior product manager for piezo products, TDK
Electronics Editor Pick feedback haptic piezo sensation tactileHaptic actuators must have unrivalled performance in terms of acceleration, force and response time
Haptic feedback creates a tactile sensation through vibration or other mechanical motion. Haptic actuators are essential to use in environments where visible and audible feedback are not possible. High-definition haptic feedback significantly enhances the sensory experience of human machine interfaces by engaging the full range of human tactile sensitivity. The haptic actuators used for these purposes often must be robust enough to operate in hostile, low-visibility and noise-filled environments. With integrated sensor functionality, these haptic actuators must have unrivalled performance in terms of acceleration, force and response time, and thus offers an unprecedented quality of haptic feedback.
Haptic feedback device technology provides that interactivity and tactile feedback. Conventional technologies including Linear Resonant Actuators (LRAs) and Eccentric Rotating Mass (ERM) are limited in the type of feedback provided, the amount of feedback provided, and the mass that can be accelerated.
On the other hand, piezo haptic actuators are capable of accelerating large masses due to the high force and displacement characteristics Piezo haptic actuators are a reliable solution for high-resolution haptic feedback. All types of feedback from vibrations, to pulses, to button-like clicks are all possible with piezo haptic actuators.
Below are four design considerations for working with haptic technology.
- Total available space
As devices become smaller, engineers must focus on shrinking the total solution, driver and haptics. Because the latter are the primary human machine interface for many devices, they must provide a seamless user experience, regardless of the environment.
For nearly every project, the total available space is one of the first considerations an engineer evaluates. With haptic technology it is no different. Space is less of a concern when designing large industrial equipment or automotive displays, however, it is a significant concern with mobile and wearable devices.
Piezo technology can help shrink devices needing to provide haptic feedback. New devices such as monolithic piezo disks and multilayer piezos are thin, have a flexible wave design combined with sensing functionality. In addition, some piezo-based solutions use a multilayer design with ceramic PZT materials and cymbals to maximize force, displacement, and acceleration providing the user with a high-definition haptic feedback in a miniature package.
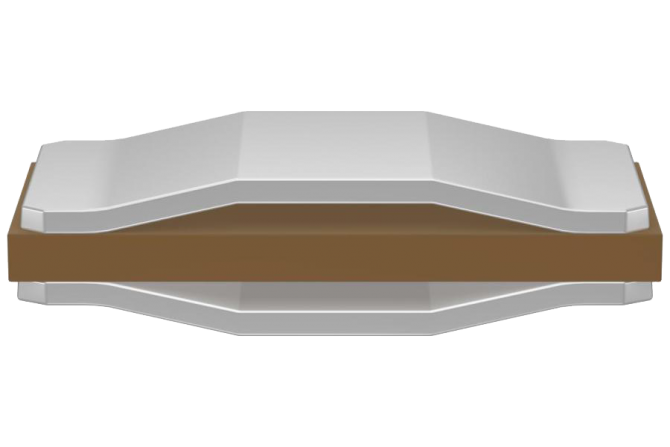
For example, the rectangular TDK PowerHap 0904H014V060 actuator has dimensions of only 9 x 3.75 x 1.4 mm with a maximum operating voltage of 60 V, yet it can accelerate a mass of 100 grams at 6.4 g (pk-pk) with maximum displacement of 18 µm. In addition, this haptic actuator only consumes 0.35 mJ per feedback.
Understanding the application’s size and space requirements will help engineers know if miniaturization is required. Most haptic actuators are available in dimensions ranging from very small to large, depending on the mass to be moved.
- Target feedback and pressure
Figure 1: The 0904H014V060 PowerHap actuator has full functionality in a compact size. Source: TDK
Second, an engineer must understand what the target or goal for feedback/acceleration is desired based on the application, including how much mass needs to be moved. This feedback is what creates the tactile sensation when the user interacts with the application. As a result, engineers must understand the environment that the application will be used within as well as the sensing capabilities of the piezo device.
Piezo devices can sense the force applied and exchange voltage signals with an ASIC or microprocessor to provide haptic feedback. In a typical implementation of piezo devices, when the user touches the “button” on a control panel, the touch is converted into a voltage based on the amount of force applied. This tactile feedback, which is based on voltage, vibrations and motion, feels like a button has been pushed.
In most automotive applications, engineers will need 6-8 g of feedback acceleration. This is compared to a cell phone which only needs 2-4 g of acceleration. An industrial keypad in a warehouse may need 10-12 g or more depending on the application’s operating environment and if users may be wearing protective clothing, including gloves. A single piezo actuator can move a mass of up to 1kg. Multiple piezo actuators can accelerate even heavier masses.
Closely associated with target feedback is the ability to sense pressure and provide haptic feedback through a material – such as the housing/frame of a mobile device. Target feedback is also dependent on the mass that will need to be moved to provide the feedback.
Actuators can altogether replace side buttons in hand-held devices while still providing the target feedback through a reinforced frame, thus enabling seamless dust- and waterproof designs.
Piezo haptic actuators can detect a broad range of pressures up to 20 N, often rendering additional touch sensors unnecessary. For example, these actuators are able to provide different feedback depending on the force applied. This pressure sensing capability allows users to feel a virtual button before using a pre-defined amount of force in order to actuate. This provides the sensation that the user is working with a physical button without the actual physical presence of one. Pressure sensing ensures that the piezo device is not inadvertently or prematurely actuated.
By understanding the feedback/acceleration and pressure considerations, an engineer can determine the number of haptic components needed for the application.
- Type of feedback
Next, an engineer must understand the type of feedback required for the application. While the end user will feel a button, a click, a bump, a vibration, or pulses there are actually millions of distinct responses that are achievable. These are made possible by the various signal forms made possible by the haptic device including sinus, square, sawtooth, trapezoidal and more.
Engineers should evaluate piezo devices based on the available signal forms. In addition, they should understand the duty cycle (or length of response), the pulse count and delay time possible from the piezo device. This feedback is what makes a good human-machine interface experience possible.
Tactile feedback is typically in the form of voltage and current pulses, with wave vibrations being the most common. In most applications, audible feedback is also needed to ensure the device operator understands that input was accepted. In some applications where significant audible noise is not desirable, the sound can be dampened by changing the waveform, voltage and frequency, as well as through electromechanical means. Engineers should often employ multiple types of feedback to reduce human error.
In the case of an automobile panel, the driver should be able to “feel” the various buttons and options for selection on a menu when their hand moves down the panel to help with navigation of the various menus, without accidentally actuating the button. Then, when they actuate a virtual button, they should both feel and hear the feedback of the virtual button so they can be positive the system accepted their input. This not only provides a simple user experience, but improves overall safety in a moving vehicle where drivers can easily be distracted.
Power consumption considerations
Finally, power consumption should be taken into account. An engineer should understand if there are some low power constraints for a given application. Typically, if the device is battery-operated – such as a mobile phone or wearables – engineers should evaluate haptic devices with the least amount of energy consumption.
When the user interacts with a haptic device, the force of the touch is converted into an input voltage. Users then feel tactile feedback based on output voltage, vibrations, sound and motion that feels like a button has been pushed. All of this consumes energy.
Piezo haptic actuators have extremely low power consumption compared with older haptic technology such as LRAs and other tactile engines. These technologies consume around 15 mJ per click, and repeated actuation can drain a battery quickly. On the other hand, the power consumption of piezo haptic actuators is low, in some cases even lower than 1 mJ per click, significantly reducing the amount of energy required, thereby improving battery life.
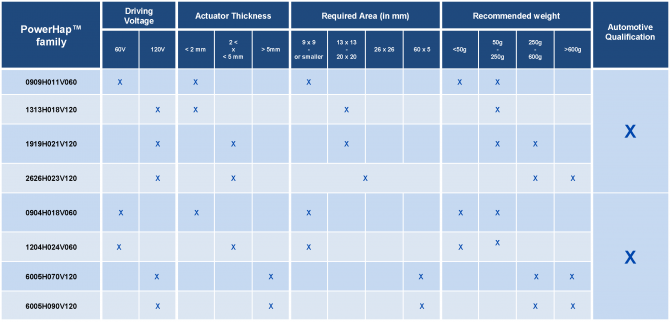
Figure 2: Selection guides like this help engineers select the best actuator for the application. Source: TDK
Thanks to their compact dimensions and low energy consumption, piezo haptic actuators can be used in mobile devices, AR/VR devices, wearables and other battery-powered devices.
Conclusion
While Piezo haptic actuators are reliable and rarely fail, understanding these four considerations will help engineers select the best piezo devices for their applications. The more questions an engineer can answer up front about the application, the better the solution that can be identified and put into place, improving the device design, protecting against environmental conditions, improving user experience, safety, and reducing energy consumption.