Fully integrated sensor prototype enriches robot hand capabilities
Stephen Law
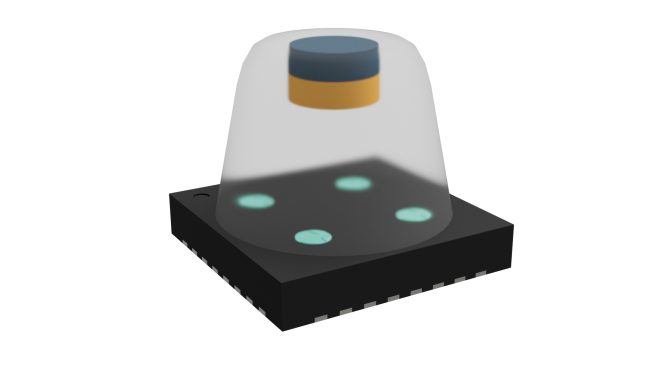
Automation / Robotics Electronics SensorMELEXIS Tactaxis fully integrated tactile sensor is compact, soft and provides the 3D force vector acting on its surface. This improves robots’ hands and grippers, enchaning delicate operations (such as fruit picking). The technology is successfully implemented in a functioning prototype that features multiple 3D magnetometer pixels, using firm’s Triaxis technology. The sensor is accompanied by a magnet which is embedded into an elastomer material. This presents a soft contact interface, emulating the attributes of human skin. The arrangement offers a high sensitivity so that detection of even small amounts of force will generate a response. The achieved force resolution is 2.7mN which is enough to distinguish weight change of a fraction of a gram (~ 0.3 gram).