Electronic skin anticipates, perceives touch
EP&T Magazine
Electronics Production / Materials Engineering Medical Wearable Technology wearablesScientists develop miniaturization of soft, highly integrated sensors for directional tactile in e-skin
A research team from Chemnitz and Dresden has taken a major step forward in the development of sensitive electronic skin (e-skin) with integrated artificial hairs. E-skins are flexible electronic systems that try to mimic the sensitivity of their natural human skin counterparts.
Applications range from skin replacement and medical sensors on the body to artificial skin for humanoid robots and androids. Tiny surface hairs can perceive and anticipate the slightest tactile sensation on human skin and even recognize the direction of touch. Modern electronic skin systems lack this capability and cannot gather this critical information about their vicinity.
A research team led by Prof. Dr. Oliver G. Schmidt, head of the Professorship of Material Systems for Nanoelectronics as well as Scientific Director of the Research Center for Materials, Architectures and Integration of Nanomembranes (MAIN) at Chemnitz University of Technology, has explored a new avenue to develop extremely sensitive and direction-dependent 3D magnetic field sensors that can be integrated into an e-skin system (active matrix). The team used a completely new approach for miniaturization and integration of 3D device arrays and made a major step towards mimicking the natural touch of human skin. The researchers have reported their results in the current issue of the prestigious journal Nature Communications.
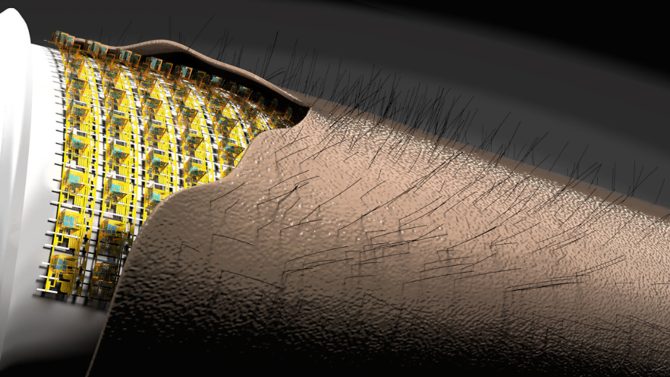
Artificial electronic skin (e-skin): Highly integrated flexible microelectronic 3D sensorics perceive movement of fine hairs on artificial skin. Image Source: Research Group Prof. Dr. Oliver G. Schmidt
Christian Becker, PhD student in Prof. Schmidt’s research group at MAIN and first author of the study says: “Our approach allows a precise spatial arrangement of functional sensor elements in 3D that can be mass-produced in a parallel manufacturing process. Such sensor systems are extremely difficult to generate by established microelectronic fabrication methods.”
Elegant origami
The core of the sensor system presented by the research team is a so-called anisotropic magnetoresistance (AMR) sensor. An AMR sensor can be used to precisely determine changes in magnetic fields. AMR sensors are currently used, for example, as speed sensors in cars or to determine the position and angle of moving components in a variety of machines.
To develop the highly compact sensor system, the researchers took advantage of the so-called “micro-origami process”. This process is used to fold AMR sensor components into three-dimensional architectures that can resolve the magnetic vector field in three dimensions. Micro-origami allows a large number of microelectronic components to fit into small space and arrange them in a geometry that is not achievable by any conventional microfabrication technologies. “Micro-origami processes were developed more than 20 years ago, and it is wonderful to see how the full potential of this elegant technology can now be exploited for novel microelectronic applications,” says Prof. Oliver Schmidt.
Prof. Dr. Oliver Schmidt (left), Christian Becker (middle) and Dr. Daniil Karnaushenko (right) present an entirely new approach to miniaturize ultra-compact and highly integrated sensor units for e-skin applications in a current publication in the journal “Nature Communications”. Image Source: Jacob Müller/Christian Becker (privat/Dr. Daniil Karnaushenko (Leibniz IFW) / Jacob Müller
The research team integrated the 3D micro-origami magnetic sensor array into a single active matrix, where each individual sensor can be conveniently addressed and read-out by microelectronic circuitry. “The combination of active-matrix magnetic sensors with self-assembling micro-origami architectures is a completely new approach to miniaturize and integrate high-resolution 3D sensing systems,” says Dr. Daniil Karnaushenko, who contributed decisively towards the concept, design and implementation of the project.
Tiny hairs anticipate, perceive direction of touch in real time
The research team has succeeded in integrating the 3D magnetic field sensors with magnetically rooted fine hairs into an artificial e-skin. The e-skin is made of an elastomeric material into which the electronics and sensors are embedded – similar to organic skin, which is interlaced with nerves.
When the hair is touched and bends, the movement and exact position of the magnetic root can be detected by the underlying 3D magnetic sensors. The sensor matrix is therefore not only able to register the bare movement of the hair, but also determines the exact direction of the movement. As with real human skin, each hair on an e-skin becomes a full sensor unit that can perceive and detect changes in the vicinity. The magneto-mechanical coupling between 3D magnetic sensor and magnetic hair root in real-time provides a new type of touch-sensitive perception by an e-skin system. This capability is of great importance when humans and robots work closely together. For instance, the robot can sense interactions with a human companion well in advance with many details just before an intended contact or an unintended collision is about to take place.